AutoMM Detection - Quick Start on a Tiny COCO Format Dataset#
![]()

In this section, our goal is to fast finetune a pretrained model on a small dataset in COCO format, and evaluate on its test set. Both training and test sets are in COCO format. See Convert Data to COCO Format for how to convert other datasets to COCO format.
Setting up the imports#
To start, let’s import MultiModalPredictor:
from autogluon.multimodal import MultiModalPredictor
Make sure mmcv-full and mmdet are installed:
!mim install mmcv-full
!pip install mmdet
Looking in links: https://download.openmmlab.com/mmcv/dist/cu117/torch1.13.0/index.html
Requirement already satisfied: mmcv-full in /home/ci/opt/venv/lib/python3.8/site-packages (1.7.1)
Requirement already satisfied: addict in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (2.4.0)
Requirement already satisfied: numpy in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (1.23.5)
Requirement already satisfied: pyyaml in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (5.4.1)
Requirement already satisfied: packaging in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (23.0)
Requirement already satisfied: opencv-python>=3 in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (4.7.0.72)
Requirement already satisfied: Pillow in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (9.4.0)
Requirement already satisfied: yapf in /home/ci/opt/venv/lib/python3.8/site-packages (from mmcv-full) (0.32.0)
Requirement already satisfied: mmdet in /home/ci/opt/venv/lib/python3.8/site-packages (2.28.2)
Requirement already satisfied: pycocotools in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (2.0.6)
Requirement already satisfied: six in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (1.16.0)
Requirement already satisfied: matplotlib in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (3.6.3)
Requirement already satisfied: scipy in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (1.10.1)
Requirement already satisfied: numpy in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (1.23.5)
Requirement already satisfied: terminaltables in /home/ci/opt/venv/lib/python3.8/site-packages (from mmdet) (3.1.10)
Requirement already satisfied: python-dateutil>=2.7 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (2.8.2)
Requirement already satisfied: kiwisolver>=1.0.1 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (1.4.4)
Requirement already satisfied: contourpy>=1.0.1 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (1.0.7)
Requirement already satisfied: pyparsing>=2.2.1 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (3.0.9)
Requirement already satisfied: fonttools>=4.22.0 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (4.38.0)
Requirement already satisfied: pillow>=6.2.0 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (9.4.0)
Requirement already satisfied: packaging>=20.0 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (23.0)
Requirement already satisfied: cycler>=0.10 in /home/ci/opt/venv/lib/python3.8/site-packages (from matplotlib->mmdet) (0.11.0)
And also import some other packages that will be used in this tutorial:
import os
import time
from autogluon.core.utils.loaders import load_zip
Downloading Data#
We have the sample dataset ready in the cloud. Let’s download it:
zip_file = "https://automl-mm-bench.s3.amazonaws.com/object_detection_dataset/tiny_motorbike_coco.zip"
download_dir = "./tiny_motorbike_coco"
load_zip.unzip(zip_file, unzip_dir=download_dir)
data_dir = os.path.join(download_dir, "tiny_motorbike")
train_path = os.path.join(data_dir, "Annotations", "trainval_cocoformat.json")
test_path = os.path.join(data_dir, "Annotations", "test_cocoformat.json")
Downloading ./tiny_motorbike_coco/file.zip from https://automl-mm-bench.s3.amazonaws.com/object_detection_dataset/tiny_motorbike_coco.zip...
100%|██████████| 21.8M/21.8M [00:00<00:00, 63.0MiB/s]
While using COCO format dataset, the input is the json annotation file of the dataset split.
In this example, trainval_cocoformat.json is the annotation file of the train-and-validate split,
and test_cocoformat.json is the annotation file of the test split.
Creating the MultiModalPredictor#
We select the "medium_quality" presets, which uses a YOLOX-small model pretrained on COCO dataset. This preset is fast to finetune or inference,
and easy to deploy. We also provide presets "high_quality" and "best quality", with higher performance but also slower.
presets = "medium_quality"
We create the MultiModalPredictor with selected presets.
We need to specify the problem_type to "object_detection",
and also provide a sample_data_path for the predictor to infer the catgories of the dataset.
Here we provide the train_path, and it also works using any other split of this dataset.
And we also provide a path to save the predictor.
It will be saved to a automatically generated directory with timestamp under AutogluonModels if path is not specified.
# Init predictor
import uuid
model_path = f"./tmp/{uuid.uuid4().hex}-quick_start_tutorial_temp_save"
predictor = MultiModalPredictor(
problem_type="object_detection",
sample_data_path=train_path,
presets=presets,
path=model_path,
)
Downloading yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth from https://download.openmmlab.com/mmdetection/v2.0/yolox/yolox_s_8x8_300e_coco/yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth...
load checkpoint from local path: yolox_s_8x8_300e_coco_20211121_095711-4592a793.pth
The model and loaded state dict do not match exactly
size mismatch for bbox_head.multi_level_conv_cls.0.weight: copying a param with shape torch.Size([80, 128, 1, 1]) from checkpoint, the shape in current model is torch.Size([10, 128, 1, 1]).
size mismatch for bbox_head.multi_level_conv_cls.0.bias: copying a param with shape torch.Size([80]) from checkpoint, the shape in current model is torch.Size([10]).
size mismatch for bbox_head.multi_level_conv_cls.1.weight: copying a param with shape torch.Size([80, 128, 1, 1]) from checkpoint, the shape in current model is torch.Size([10, 128, 1, 1]).
size mismatch for bbox_head.multi_level_conv_cls.1.bias: copying a param with shape torch.Size([80]) from checkpoint, the shape in current model is torch.Size([10]).
size mismatch for bbox_head.multi_level_conv_cls.2.weight: copying a param with shape torch.Size([80, 128, 1, 1]) from checkpoint, the shape in current model is torch.Size([10, 128, 1, 1]).
size mismatch for bbox_head.multi_level_conv_cls.2.bias: copying a param with shape torch.Size([80]) from checkpoint, the shape in current model is torch.Size([10]).
Finetuning the Model#
Learning rate, number of epochs, and batch_size are included in the presets, and thus no need to specify. Note that we use a two-stage learning rate option during finetuning by default, and the model head will have 100x learning rate. Using a two-stage learning rate with high learning rate only on head layers makes the model converge faster during finetuning. It usually gives better performance as well, especially on small datasets with hundreds or thousands of images. We also compute the time of the fit process here for better understanding the speed. We run it on a g4.2xlarge EC2 machine on AWS, and part of the command outputs are shown below:
start = time.time()
predictor.fit(train_path) # Fit
train_end = time.time()
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
Using default root folder: ./tiny_motorbike_coco/tiny_motorbike/Annotations/... Specify `root=...` if you feel it is wrong...
Global seed set to 123
AutoMM starts to create your model. ✨
- Model will be saved to "/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save".
- Validation metric is "map".
- To track the learning progress, you can open a terminal and launch Tensorboard:
```shell
# Assume you have installed tensorboard
tensorboard --logdir /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save
```
Enjoy your coffee, and let AutoMM do the job ☕☕☕ Learn more at https://auto.gluon.ai
GPU available: True (cuda), used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
HPU available: False, using: 0 HPUs
`Trainer(val_check_interval=1.0)` was configured so validation will run at the end of the training epoch..
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
| Name | Type | Params
-----------------------------------------------------------------------
0 | model | MMDetAutoModelForObjectDetection | 8.9 M
1 | validation_metric | MeanAveragePrecision | 0
-----------------------------------------------------------------------
8.9 M Trainable params
0 Non-trainable params
8.9 M Total params
35.765 Total estimated model params size (MB)
/home/ci/opt/venv/lib/python3.8/site-packages/torch/functional.py:504: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at ../aten/src/ATen/native/TensorShape.cpp:3190.)
return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]
Epoch 2, global step 6: 'val_map' reached 0.16292 (best 0.16292), saving model to '/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save/epoch=2-step=6.ckpt' as top 1
Epoch 5, global step 12: 'val_map' reached 0.18377 (best 0.18377), saving model to '/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save/epoch=5-step=12.ckpt' as top 1
Epoch 8, global step 18: 'val_map' reached 0.20572 (best 0.20572), saving model to '/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save/epoch=8-step=18.ckpt' as top 1
Epoch 11, global step 24: 'val_map' reached 0.22416 (best 0.22416), saving model to '/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save/epoch=11-step=24.ckpt' as top 1
Epoch 14, global step 30: 'val_map' was not in top 1
Epoch 17, global step 36: 'val_map' was not in top 1
Epoch 20, global step 42: 'val_map' was not in top 1
AutoMM has created your model 🎉🎉🎉
- To load the model, use the code below:
```python
from autogluon.multimodal import MultiModalPredictor
predictor = MultiModalPredictor.load("/home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save")
```
- You can open a terminal and launch Tensorboard to visualize the training log:
```shell
# Assume you have installed tensorboard
tensorboard --logdir /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save
```
- If you are not satisfied with the model, try to increase the training time,
adjust the hyperparameters (https://auto.gluon.ai/stable/tutorials/multimodal/advanced_topics/customization.html),
or post issues on GitHub: https://github.com/autogluon/autogluon
Notice that at the end of each progress bar, if the checkpoint at current stage is saved,
it prints the model’s save path.
In this example, it’s ./quick_start_tutorial_temp_save.
Print out the time and we can see that it’s fast!
print("This finetuning takes %.2f seconds." % (train_end - start))
This finetuning takes 121.92 seconds.
Evaluation#
To evaluate the model we just trained, run following code.
And the evaluation results are shown in command line output. The first line is mAP in COCO standard, and the second line is mAP in VOC standard (or mAP50). For more details about these metrics, see COCO’s evaluation guideline. Note that for presenting a fast finetuning we use presets “medium_quality”, you could get better result on this dataset by simply using “high_quality” or “best_quality” presets, or customize your own model and hyperparameter settings: Customization, and some other examples at Fast Fine-tune Coco or High Performance Fine-tune Coco.
predictor.evaluate(test_path)
eval_end = time.time()
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
saving file at /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/AutogluonModels/ag-20230302_164028/object_detection_result_cache.json
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
Loading and preparing results...
DONE (t=0.00s)
creating index...
index created!
Running per image evaluation...
Evaluate annotation type *bbox*
DONE (t=0.07s).
Accumulating evaluation results...
DONE (t=0.04s).
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.304
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.491
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.312
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.231
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.249
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.667
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.199
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.375
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.406
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.382
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.348
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.778
Using default root folder: ./tiny_motorbike_coco/tiny_motorbike/Annotations/... Specify `root=...` if you feel it is wrong...
A new predictor save path is created.This is to prevent you to overwrite previous predictor saved here.You could check current save path at predictor._save_path.If you still want to use this path, set resume=True
No path specified. Models will be saved in: "AutogluonModels/ag-20230302_164028/"
Print out the evaluation time:
print("The evaluation takes %.2f seconds." % (eval_end - train_end))
The evaluation takes 1.18 seconds.
We can load a new predictor with previous save_path, and we can also reset the number of GPUs to use if not all the devices are available:
# Load and reset num_gpus
new_predictor = MultiModalPredictor.load(model_path)
new_predictor.set_num_gpus(1)
Load pretrained checkpoint: /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/tmp/598c01c170d94d7ea99bcda2bc1092d0-quick_start_tutorial_temp_save/model.ckpt
Evaluating the new predictor gives us exactly the same result:
# Evaluate new predictor
new_predictor.evaluate(test_path)
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
saving file at /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/AutogluonModels/ag-20230302_164029/object_detection_result_cache.json
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
Loading and preparing results...
DONE (t=0.00s)
creating index...
index created!
Running per image evaluation...
Evaluate annotation type *bbox*
DONE (t=0.07s).
Accumulating evaluation results...
DONE (t=0.04s).
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.304
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.491
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.312
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.231
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.249
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.667
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.199
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.375
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.406
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.382
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.348
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.778
Using default root folder: ./tiny_motorbike_coco/tiny_motorbike/Annotations/... Specify `root=...` if you feel it is wrong...
A new predictor save path is created.This is to prevent you to overwrite previous predictor saved here.You could check current save path at predictor._save_path.If you still want to use this path, set resume=True
No path specified. Models will be saved in: "AutogluonModels/ag-20230302_164029/"
{'map': 0.3036573169994696,
'mean_average_precision': 0.3036573169994696,
'map_50': 0.4911915676777609,
'map_75': 0.31221983796067904,
'map_small': 0.230937391353684,
'map_medium': 0.2488756925858619,
'map_large': 0.6666900068541676,
'mar_1': 0.19903359173126617,
'mar_10': 0.37490063424947145,
'mar_100': 0.40598778482499415,
'mar_small': 0.3822916666666667,
'mar_medium': 0.34817460317460314,
'mar_large': 0.7780386864597391}
For how to set the hyperparameters and finetune the model with higher performance, see AutoMM Detection - High Performance Finetune on COCO Format Dataset.
Inference#
Now that we have gone through the model setup, finetuning, and evaluation, this section details the inference. Specifically, we layout the steps for using the model to make predictions and visualize the results.
To run inference on the entire test set, perform:
pred = predictor.predict(test_path)
print(pred)
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
image \
0 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
1 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
2 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
3 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
4 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
5 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
6 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
7 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
8 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
9 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
10 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
11 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
12 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
13 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
14 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
15 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
16 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
17 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
18 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
19 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
20 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
21 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
22 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
23 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
24 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
25 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
26 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
27 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
28 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
29 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
30 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
31 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
32 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
33 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
34 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
35 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
36 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
37 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
38 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
39 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
40 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
41 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
42 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
43 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
44 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
45 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
46 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
47 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
48 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
49 ./tiny_motorbike_coco/tiny_motorbike/Annotatio...
bboxes
0 [{'class': 'car', 'bbox': [2.1484315, 257.0525...
1 [{'class': 'motorbike', 'bbox': [207.52922, 14...
2 [{'class': 'car', 'bbox': [457.4855, 102.67718...
3 [{'class': 'motorbike', 'bbox': [14.945769, 31...
4 [{'class': 'motorbike', 'bbox': [94.36911, 197...
5 [{'class': 'car', 'bbox': [12.558749, 45.28269...
6 [{'class': 'car', 'bbox': [229.77034, 238.4682...
7 [{'class': 'motorbike', 'bbox': [94.64401, 140...
8 [{'class': 'motorbike', 'bbox': [53.823128, 67...
9 [{'class': 'bicycle', 'bbox': [345.2117, 1.624...
10 [{'class': 'car', 'bbox': [486.32224, 126.9795...
11 [{'class': 'motorbike', 'bbox': [6.408143, 186...
12 [{'class': 'car', 'bbox': [461.1808, 55.34622,...
13 [{'class': 'motorbike', 'bbox': [55.763912, 52...
14 [{'class': 'motorbike', 'bbox': [136.7548, 106...
15 [{'class': 'motorbike', 'bbox': [186.17813, 17...
16 [{'class': 'car', 'bbox': [442.1612, 70.14858,...
17 [{'class': 'motorbike', 'bbox': [70.626724, 26...
18 [{'class': 'motorbike', 'bbox': [77.234055, 67...
19 [{'class': 'car', 'bbox': [2.232, 89.02937, 34...
20 [{'class': 'cow', 'bbox': [43.235477, 49.08950...
21 [{'class': 'motorbike', 'bbox': [100.396255, 1...
22 [{'class': 'car', 'bbox': [330.98575, 128.9296...
23 [{'class': 'motorbike', 'bbox': [32.826233, 46...
24 [{'class': 'motorbike', 'bbox': [48.061707, 10...
25 [{'class': 'motorbike', 'bbox': [77.84818, 131...
26 [{'class': 'motorbike', 'bbox': [69.207825, 94...
27 [{'class': 'motorbike', 'bbox': [15.236938, 36...
28 [{'class': 'motorbike', 'bbox': [38.892673, 10...
29 [{'class': 'car', 'bbox': [305.98874, 124.8324...
30 [{'class': 'car', 'bbox': [486.43765, 59.72458...
31 [{'class': 'car', 'bbox': [326.13272, 103.2295...
32 [{'class': 'motorbike', 'bbox': [107.524765, 1...
33 [{'class': 'motorbike', 'bbox': [21.280432, 26...
34 [{'class': 'car', 'bbox': [19.728685, 3.214742...
35 [{'class': 'car', 'bbox': [378.56097, 47.99136...
36 [{'class': 'motorbike', 'bbox': [5.8870826, 23...
37 [{'class': 'motorbike', 'bbox': [7.891488, 61....
38 [{'class': 'motorbike', 'bbox': [10.63509, 16....
39 [{'class': 'motorbike', 'bbox': [156.89815, 28...
40 [{'class': 'car', 'bbox': [0.31633973, 315.486...
41 [{'class': 'motorbike', 'bbox': [14.279389, 70...
42 [{'class': 'car', 'bbox': [493.4626, 115.12408...
43 [{'class': 'bus', 'bbox': [256.481, 7.0771556,...
44 [{'class': 'motorbike', 'bbox': [53.647495, 13...
45 [{'class': 'motorbike', 'bbox': [166.38937, 11...
46 [{'class': 'motorbike', 'bbox': [66.101265, 98...
47 [{'class': 'bicycle', 'bbox': [0.0029951334, 6...
48 [{'class': 'motorbike', 'bbox': [37.219406, 10...
49 [{'class': 'motorbike', 'bbox': [6.445992, 173...
Using default root folder: ./tiny_motorbike_coco/tiny_motorbike/Annotations/... Specify `root=...` if you feel it is wrong...
The output pred is a pandas DataFrame that has two columns, image and bboxes.
In image, each row contains the image path
In bboxes, each row is a list of dictionaries, each one representing a bounding box: {"class": <predicted_class_name>, "bbox": [x1, y1, x2, y2], "score": <confidence_score>}
Note that, by default, the predictor.predict does not save the detection results into a file.
To run inference and save results, run the following:
pred = predictor.predict(test_path, save_results=True)
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
Saved detection results to /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/AutogluonModels/ag-20230302_164032/result.txt
Using default root folder: ./tiny_motorbike_coco/tiny_motorbike/Annotations/... Specify `root=...` if you feel it is wrong...
A new predictor save path is created.This is to prevent you to overwrite previous predictor saved here.You could check current save path at predictor._save_path.If you still want to use this path, set resume=True
No path specified. Models will be saved in: "AutogluonModels/ag-20230302_164032/"
Saved detection results to /home/ci/autogluon/docs/tutorials/multimodal/object_detection/quick_start/AutogluonModels/ag-20230302_164032/result.txt
Here, we save pred into a .txt file, which exactly follows the same layout as in pred.
You can use a predictor initialized in any way (i.e. finetuned predictor, predictor with pretrained model, etc.).
Visualizing Results#
To run visualizations, ensure that you have opencv installed. If you haven’t already, install opencv by running
!pip install opencv-python
Requirement already satisfied: opencv-python in /home/ci/opt/venv/lib/python3.8/site-packages (4.7.0.72)
Requirement already satisfied: numpy>=1.17.0 in /home/ci/opt/venv/lib/python3.8/site-packages (from opencv-python) (1.23.5)
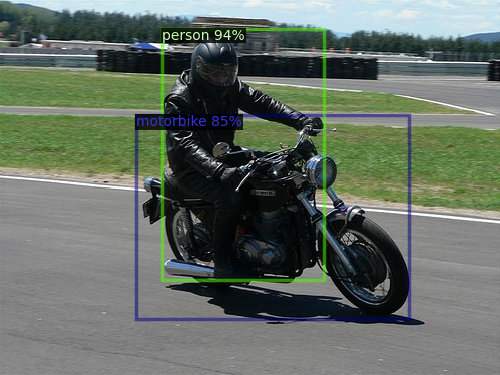
To visualize the detection bounding boxes, run the following:
from autogluon.multimodal.utils import Visualizer
conf_threshold = 0.4 # Specify a confidence threshold to filter out unwanted boxes
image_result = pred.iloc[30]
img_path = image_result.image # Select an image to visualize
visualizer = Visualizer(img_path) # Initialize the Visualizer
out = visualizer.draw_instance_predictions(image_result, conf_threshold=conf_threshold) # Draw detections
visualized = out.get_image() # Get the visualized image
from PIL import Image
from IPython.display import display
img = Image.fromarray(visualized, 'RGB')
display(img)
Testing on Your Own Image#
You can also download an image and run inference on that single image. The follow is an example:
Download the example image:
from autogluon.multimodal import download
image_url = "https://raw.githubusercontent.com/dmlc/web-data/master/gluoncv/detection/street_small.jpg"
test_image = download(image_url)
Downloading street_small.jpg from https://raw.githubusercontent.com/dmlc/web-data/master/gluoncv/detection/street_small.jpg...
Run inference:
pred_test_image = predictor.predict({"image": [test_image]})
print(pred_test_image)
image bboxes
0 street_small.jpg [{'class': 'car', 'bbox': [237.0257, 209.06996...
Other Examples#
You may go to AutoMM Examples to explore other examples about AutoMM.
Customization#
To learn how to customize AutoMM, please refer to Customize AutoMM.
Citation#
@article{DBLP:journals/corr/abs-2107-08430,
author = {Zheng Ge and
Songtao Liu and
Feng Wang and
Zeming Li and
Jian Sun},
title = {{YOLOX:} Exceeding {YOLO} Series in 2021},
journal = {CoRR},
volume = {abs/2107.08430},
year = {2021},
url = {https://arxiv.org/abs/2107.08430},
eprinttype = {arXiv},
eprint = {2107.08430},
timestamp = {Tue, 05 Apr 2022 14:09:44 +0200},
biburl = {https://dblp.org/rec/journals/corr/abs-2107-08430.bib},
bibsource = {dblp computer science bibliography, https://dblp.org},
}